
Hi, I'm Ahad Jawaid.
I'm a builder, engineer, and scientist who believes in humanity's ability to solve any problem.
Some important problems I'm interested in solving:
- Space colonization via self-replicating autonomous robots (working on this)
- The user interface problem via brain-computer interfaces
- All diseases (including aging) via biotech
If you're interested in collaborating, chatting about these problems, or funding me, reach out at .
Research
OpenEgo: A Large-Scale Egocentric Manipulation Dataset
Ahad Jawaid, Yu Xiang
Physical Inc
TL;DR: A large-scale egocentric dataset and framework for learning dexterous manipulation skills from human demonstration videos.
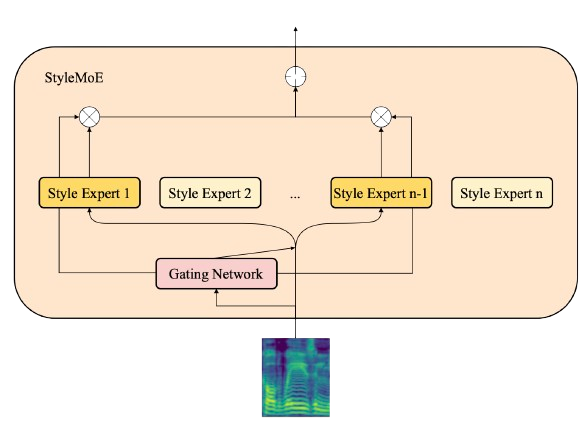
StyleMoE: Style-Aware Mixture of Experts for Expressive TTS
Ahad Jawaid, Shreeram Suresh Chandra, Junchen Lu, Berrak Sisman
Audio Imagination @ NeurIPS 2024
TL;DR: A mixture-of-experts approach that partitions the style space of reference speech, letting expert routers specialize for more expressive style-transfer text-to-speech.
Projects
Lattice Arm
An open-source, low-cost modular and detachable robotic arm designed for tool-use, built on the SO-101 and LeRobot.
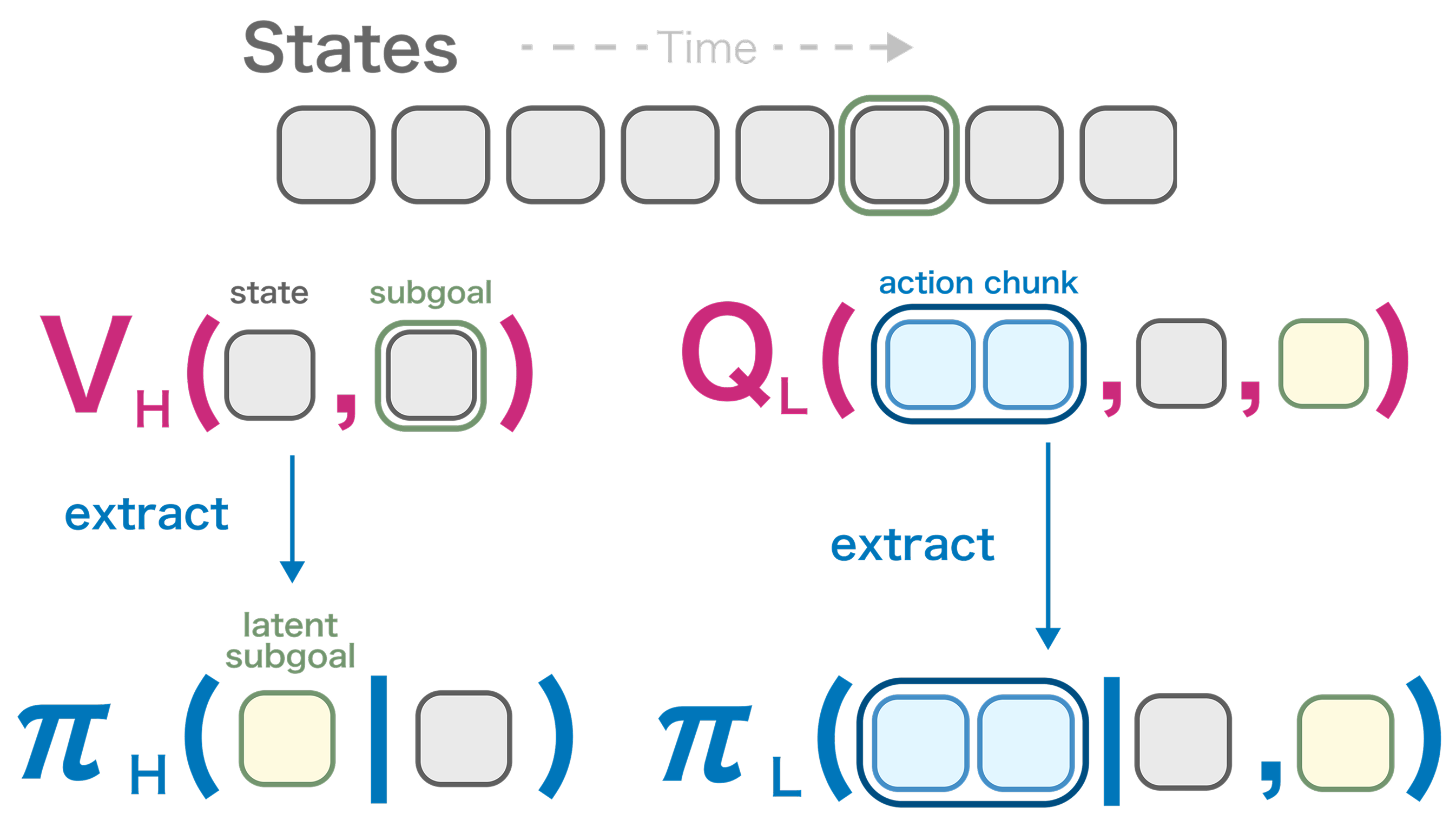
Bimanual Towel Folding Robot
A bimanual robot that learns to fold towels, with a follow-up using real-time chunking (RTC) for smoother execution.
Speech LM
An implementation of a speech language model trained to generate and continue audio.
Biomemex
A bio lab AI copilot that tracks your procedure and flags mistakes.
Chessbot
A physical robot that plays chess against you on a real board.
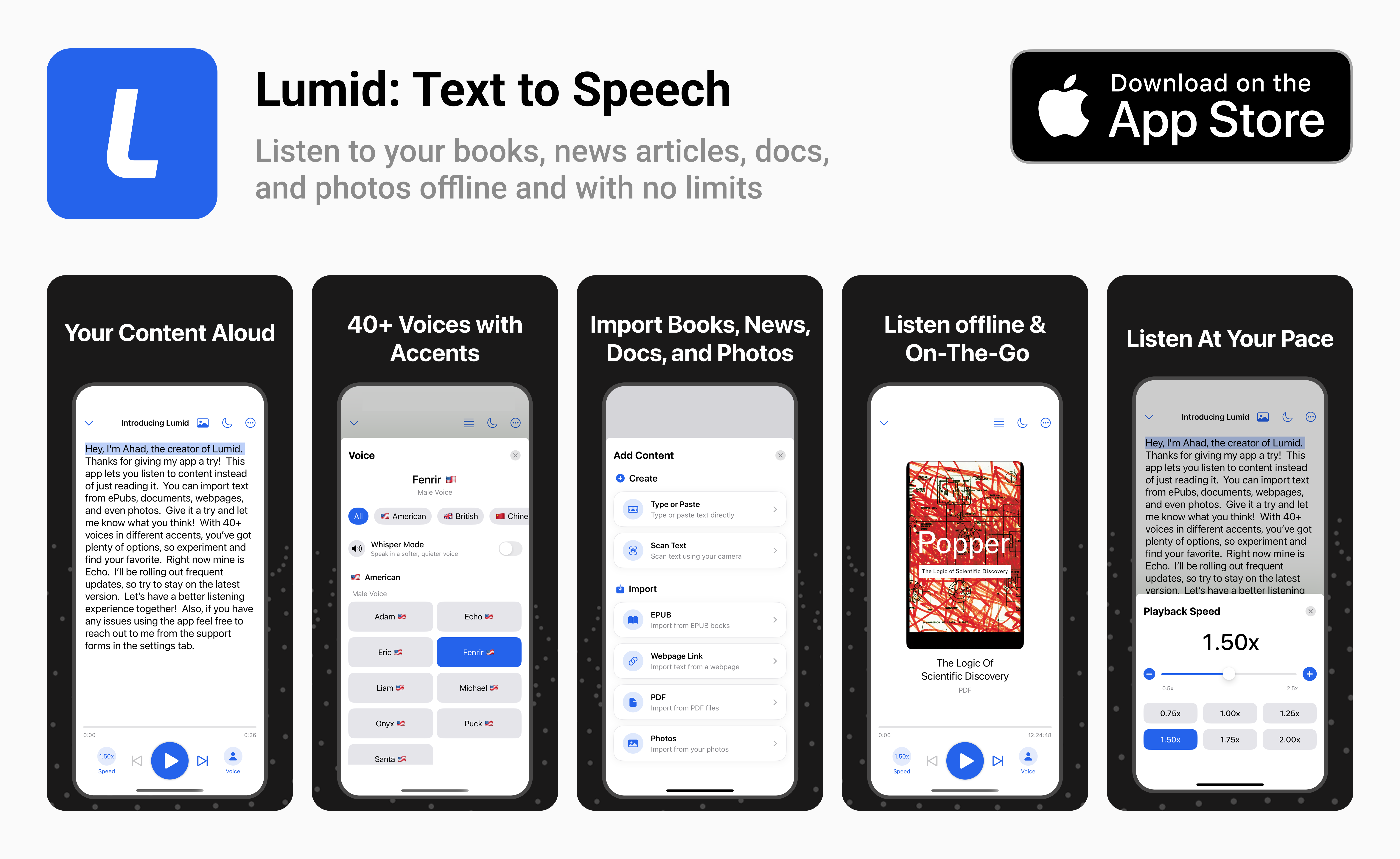
Lumid
An iOS app that turns any text into natural, expressive speech you can listen to anywhere.
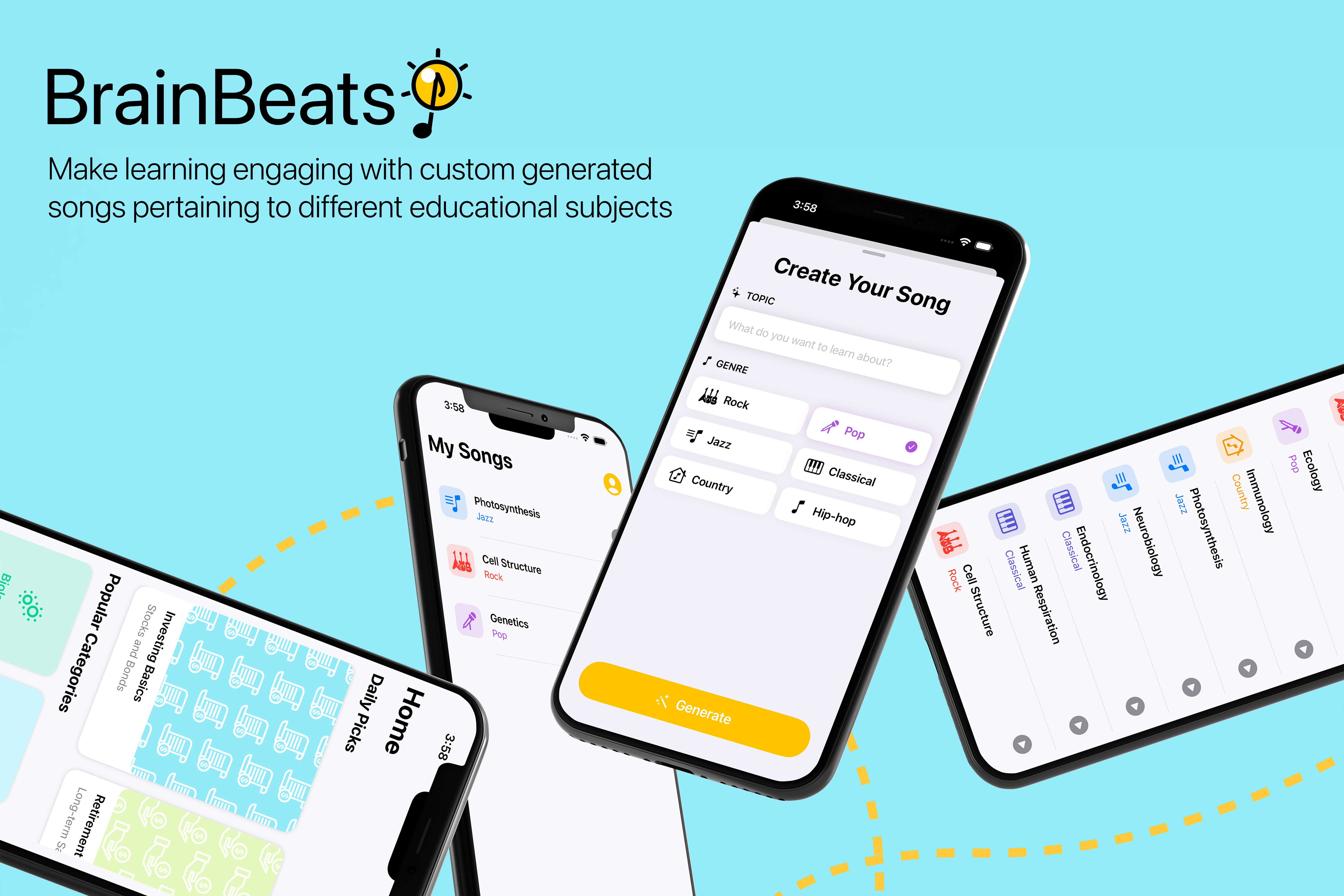
BrainBeats
Type a topic, pick a genre, press play. Turn knowledge into music and make learning unforgettable.
Writing
All writing →Experience
Software Engineer (AI/ML) · SpaceX
Jun 2026 – PresentResearcher · Intelligent Robotics and Vision Lab, UT Dallas
May 2024 – Jun 2026Founder · Physical Inc
Sep 2025 – Dec 2025Software Engineer · Amazon Web Services (AWS)
May 2025 – Aug 2025Founder · Lumid Labs
Jan 2025 – PresentResearcher · Speech and Machine Learning Lab, UT Dallas
Aug 2023 – May 2024Software Engineer · Amazon
May 2023 – Aug 2023
Awards
- 2025TAMUHack 2025, Best Design
- 2024Jonsson School Undergraduate Research Award
- 2024TAMUHack 2024, Best Use of AI in Education
- 2023HackUTD 2023, 1st place in Patient Safety Challenge
- 2022HackUTD 2022, 3rd place in CBRE Challenge
- 2022WeHack 2022, 3rd place in Toyota Challenge
Teaching
Workshops
ML Mondays
- Week 1: Introduction to ML MondaysVideoMaterials
- Week 2: Introduction to Deep Learning, Part 1VideoMaterials
- Week 3: Introduction to Deep Learning, Part 2VideoMaterials
- Week 4: Training and Deploying a ML ModelVideoMaterials
- Week 5: Computer VisionVideoMaterials
- Week 6: Introduction to Natural Language ProcessingVideo
- Week 7: Natural Language Processing, TransformersVideo
- Week 8: Introduction to Reinforcement LearningVideo
- Week 9: Reinforcement LearningVideo